
RiLS is a five-year (2026–2031) philosophical research project funded by the Italian programme FIS (Fondo Italiano per la Scienza). The project's goal is to investigate the contemporary use of robots as experimental tools in the life sciences. It will address various issues in the philosophy of modelling, measurement, discovery, explanation, and cognitive science. It will adopt an 'in vivo' approach, with philosophical analysis carried out within scientific case studies organised through collaboration with and recruitment of scientific research personnel.
In 2026, the lab will recruit postdoctoral researchers with expertise in the philosophy of science and various areas of biorobotics. If you are interested in applying, please email edoardo.datteri@unimib.it. More information will be posted here soon.
Robots are increasingly used as experimental tools in the life sciences to perform automated measurements of inaccessible environments, discover neural and cognitive mechanisms, provide reliable and controlled stimuli for behavioural studies, explain individual and social cognition. As such, they are natural objects of study for the philosophy of science. Can they provide novel, genuine, reliable and epistemically justifiable knowledge about the behaviour and mechanisms of living systems? In the Lab, we address this broad question by linking it to the philosophical debate on the possibility of automating science, the role of models in science, inter-theoretical reduction, scientific measurement, scientific explanation. We explore what robots can legitimately offer as tools for measurement, scientific discovery, model testing, and explanation of biological and cognitive capacities, based on our "in vivo" philosophical approach.
Surrogative stimulation
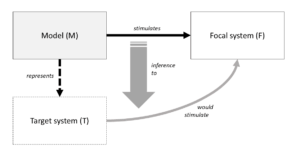
Occasionally, in science, models are used to stimulate other systems rather than to perform surrogative reasoning. In surrogative stimulation, a model is used to stimulate a focal system in order to learn how it would respond to the system represented by the model. The use of surrogative stimulation is becoming increasingly common in ethorobotics. We are analysing the methodological structure of this approach to identify the conditions of its validity.
- Datteri, E. (2025). Models for Surrogative Stimulation. Erkenntnis. https://doi.org/10.1007/s10670-025-00951-7
- Datteri, E., Chaminade, T., & Romano, D. (2022). Going Beyond the “Synthetic Method”: New Paradigms Cross-Fertilizing Robotics and Cognitive Neuroscience. Frontiers in Psychology, 13, 819042. https://doi.org/10.3389/fpsyg.2022.819042
- Datteri, E. (2021a). Interactive biorobotics. Synthese, 198(8), 7577–7595. https://doi.org/10.1007/s11229-020-02533-2
- Datteri, E. (2021b). The creation of phenomena in interactive biorobotics. Biological Cybernetics, 115(6), 629–642. https://doi.org/10.1007/s00422-021-00900-x
Biorobotics
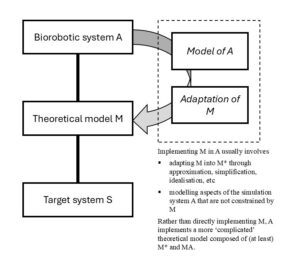
Robots are often used as experimental models to study the behaviour and cognition of living systems. Unlike ethorobotics (see above), biorobotics involves using robots to perform what philosophers call surrogative reasoning. The key issue here is whether their epistemic use can be justified. Despite being so different from living systems in terms of their material and mechanistic composition, can they really offer genuine knowledge about them? Can they contribute to the prediction and/or explanation of biological and cognitive behaviour and capacities? If so, what kind of explanation is involved? How can a biological or cognitive model be ‘translated’ into a robotic one in a theoretically sensible way? We address these questions by distinguishing between ‘prediction-oriented’ and ‘model-oriented’ experiments, as well as between heuristic and theory-driven uses of robots.
- Datteri, E., & Tamburrini, G. (2007). Biorobotic Experiments for the Discovery of Biological Mechanisms. Philosophy of Science, 74(3), 409–430. https://doi.org/10.1086/522095
- Datteri, E. (2017). Biorobotics. In L. Magnani & T. Bertolotti (Eds.), Springer Handbook of Model-Based Science (pp. 817–837). Springer International Publishing. https://doi.org/10.1007/978-3-319-30526-4_37
- Datteri, E. (2021). Robots and Bionic Systems as Experimental Platforms for the Study of Animal and Human Behaviour. In S. Chiodo & V. Schiaffonati (Eds.), Italian Philosophy of Technology (Vol. 35, pp. 181–197). Springer International Publishing. https://doi.org/10.1007/978-3-030-54522-2_12
- Datteri, E., & Schiaffonati, V. (2019). Robotic Simulations, Simulations of Robots. Minds and Machines, 29(1), 109–125. https://doi.org/10.1007/s11023-019-09490-x
- Tamburrini, G., & Datteri, E. (2005). Machine experiments and theoretical modelling: From cybernetic methodology to neuro-robotics. Minds and Machines, 15(3–4), 335–358. https://doi.org/10.1007/s11023-005-2924-x
Bionic systems
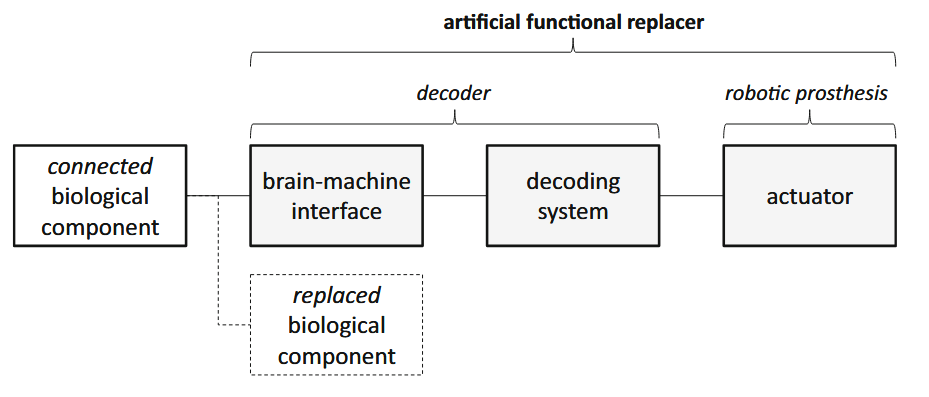
Bionic technologies that connect neural tissues directly to electromechanical devices promise to not only restore, but also augment, the sensory, motor and cognitive capacities of people with impairments. They have also been used to study neural circuits and cognition. Based on an analysis of case studies, we have distinguished between ‘stimulation-connection’ and ‘simulation-replacement’ strategies, examining their conditions of validity.
- Datteri, E. (2017). The Epistemic Value of Brain–Machine Systems for the Study of the Brain. Minds and Machines, 27(2), 287–313. https://doi.org/10.1007/s11023-016-9406-1
- Datteri, E. (2009). Simulation experiments in bionics: A regulative methodological perspective. Biology & Philosophy, 24(3), 301–324. https://doi.org/10.1007/s10539-008-9133-y

Neuroscience and brain simulation
We have addressed some philosophical issues relating to the philosophy of neuroscience and the validity of brain simulations. We analysed the concept of the biological accuracy of brain simulations, distinguishing between its different meanings. We have also reflected on the role of generalisations in testing neuroscientific models. Furthermore, we have proposed that box-and-arrow diagrams are no more abstract than mechanism descriptions in neuroscience.
- Datteri, E. (2020). Biological accuracy in large-scale brain simulations. History and Philosophy of the Life Sciences, 42(1). Scopus. https://doi.org/10.1007/s40656-020-0299-1
- Datteri, E., & Laudisa, F. (2012). Model testing, prediction and experimental protocols in neuroscience: A case study. Studies in History and Philosophy of Science Part C: Studies in History and Philosophy of Biological and Biomedical Sciences, 43(3), 602–610. https://doi.org/10.1016/j.shpsc.2012.04.001
- Datteri, E., & Laudisa, F. (2014). Box-and-arrow explanations need not be more abstract than neuroscientific mechanism descriptions. Frontiers in Psychology, 5. https://doi.org/10.3389/fpsyg.2014.00464